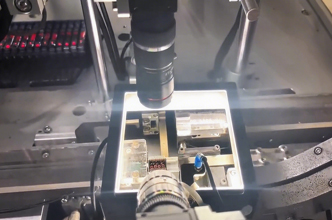
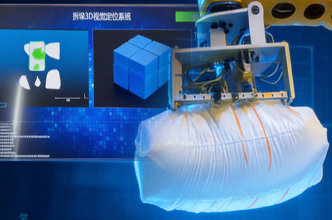
ҕ�X�����C����ϵ�y:�����C���˜ʴ_ץȡ�����_ָ��λ����ָ���ˑB�M���b���ÙCе���Fץȡ���D�\���b�䡣���؉Kλ�ò��̶����ѯB��B�S�C�� �����a����Ҫ����10���ԃȣ���ˮ������_�C���˲��й����� �b����ˮ���й̶����ġ�
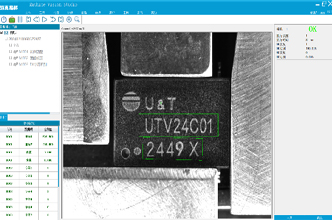
ͨ�^�C����3D��λϵ�y�����C���������P�����F�o�˻����Ԅӻ����a��ͨ�^3Dҕ�X�������F���S���趨λ�� �x�ü�����ҕҰ�ĮaƷ��̖�� �����R�e�ٶȺ͙C����·�������F<10s���a���ġ� ͨ�^�㷨���Fһ�Β����ṩ����λ�����ˣ����C��ˮ���̶����ġ�
|